|
|

汉鲲智能农业植保无人机 =
专业飞控 +“零门槛”智能操作 + 高性价比无人机动力套装
| 10公斤载荷植保无人机Y4-10 技术参数 |
 |
|
| 16公斤载荷植保无人机Y6-16 技术参数 |
 |
|
| 植保无人机飞控系统ROF-F1 |
 |
|
激光定高模块 体积小(20 X 48 X 40 毫米),重量轻(16克); 0-40米的作用距离,可实现-/+2.5厘米的高精度测量; 激光测距模块的融入显著提升了无人机的高度保持性能; 实现的优异仿地飞行性能满足了应用场景对无人机飞行高度的灵活要求。 |
 |
 |
毫米波雷达避障 K波段毫米波雷达,24GHZ ISM波段信号,2厘米测量精度,50米测量距离; 实时感知无人机周围的障碍物信息,融入飞控系统的融合导航算法, 实现无人机的全自主智能避障功能。 |
|
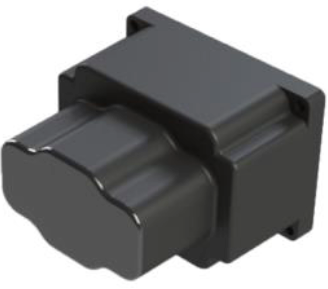
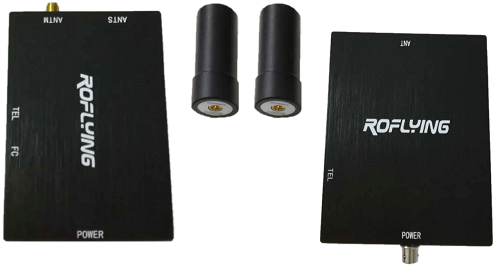
RTK定位 + 双天线定向 RTK差分GPS系统包含小体积、低功耗的差分GPS定位组件、双路3频点天线和差分信号链路; 其机载部分和地面基站的协同工作实现厘米级别的水平定位精度; 同时与常规单点GPS模块形成冗余互补,保证了定位信息的高级别可靠性; 双天线系统支持GPS卫星定向测量,与磁罗盘冗余互补测量航向,增强抗磁干扰能力,确保高精度航向测量。 |
 |
| 高度优化的延伸卡门滤波器,先进的非线性自适应控制技术 |
保证了飞行全程的高可靠性控制精度 GPS模式下的悬停精度可达垂直方向:±0.5m ,水平方向±1.5m 差分GPS模式下厘米级别的定位精度 |
| 全自主避障 |
融合超声波传感器、激光传感器、 毫米波雷达等距离传感器,具备全自主避障能力。 |
| 丰富的飞行模式,简便的操作控制 | 高度控制模式、航线跟踪模式、随点随飞模式、AB点飞行模式 |
| 完备的安全控制模式 |
实时电压监控报警功能,低电压时执行原地或返航或返航降落 遥控信号中断时执行自动返航功能 数传信号中断时执行自动返航功能 药量液位过低自动返航降落 |
| 支持多种多旋翼无人机结构 |
Y3型三旋翼、 +4和x4型四旋翼 +6、x6、Y6和RevY6型六旋翼、+8、x8型八旋翼 |
| 植保无人机地面站智能操控软件 |
 |
“专人专机”操控
飞控系统唯一ID标识和操控人员身份秘钥设置 确保了“专人专机”的植保作业安全模式, 当且仅当二者链接匹配通过时,无人机才可作业飞行。 |
|
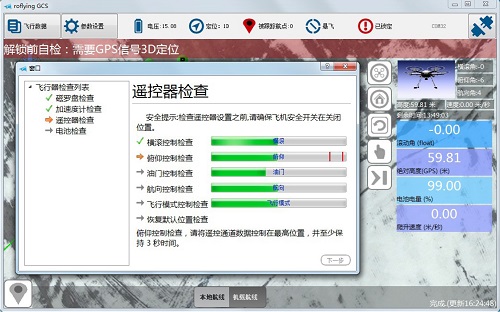
规范化操控
地面站软件规范植保流程,从开机检测到作业飞行, 依据专业步骤引导植保操作,最大化减少误操作。 |
|
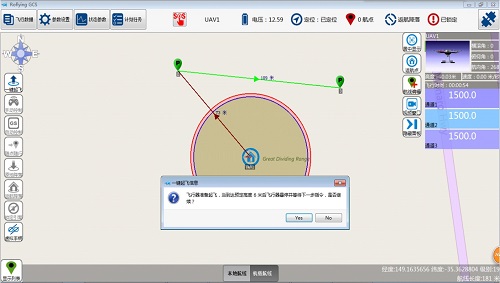 |
电子围栏防护
三维电子围栏设置; 触碰电子围栏后悬停、原地降落、返航降落等飞行模式, 确保植保无人机在规定范围内的安全飞行。 |
|
无门槛操控
无需遥控器操控,纯平板操控设备; 一键操控方式:点中一个按键,无人机匀速沿一个方向飞行; 松开按键,无人机悬停。 |
 |

|
AB点航线
基于地面站软件的“AB点“点选操作方式直观便捷; AB点航线自动生成,内设航线边界保护机制,。 确保航线的安全有效范围。。 |
|
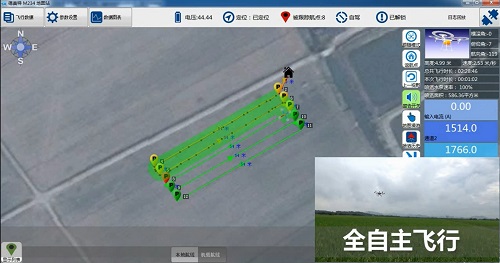
智能航线跟踪喷洒
极简单的喷洒航线自动生成工具; 厘米级的航线跟踪精度; 喷洒速度和幅度的全自动智能化调整; 全自动的喷洒作业:一键起飞+航线跟踪+自动返航降落。 |

|
|
|
断点续喷
针对大范围航线,航行中间需要返航加药,更换电池。 重新起飞后,自动返回中断点,继续跟踪航线飞行。 |
|
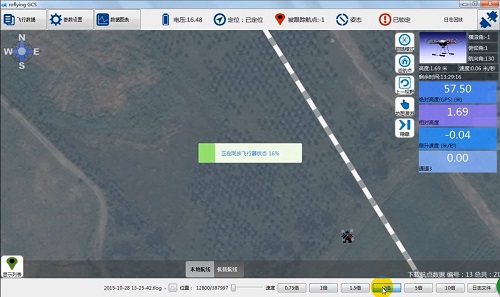
喷洒数据友好显示
喷洒轨迹实时显示,轨迹颜色深浅依据喷洒量自动变化; 飞行时长,喷洒速率,喷洒面积实时显示,一目了然; |
|
|
喷洒作业回放
无人机喷洒工作的全程数据会自动保存在记录文件中。
记录回放功能可以回放整个飞行过程, 以用于记录植保作业过程,评估植保作业质量。 |
